隨著工業4.0和智能制造的深入推進,智能物流倉儲系統已成為現代供應鏈與生產體系的核心支柱。在這一體系中,自動導引運輸車(AGV)方案與智能控制系統的深度集成,是實現倉儲作業自動化、柔性化和數字化的關鍵路徑。本文旨在探討二者集成的核心架構、技術要點與協同價值。
一、 系統集成核心架構
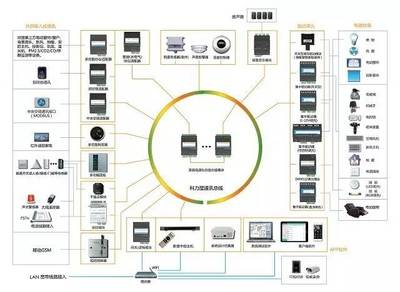
一個先進的智能物流倉儲集成系統,通常呈現為三層架構:
- 物理執行層: 以AGV小車為核心載體,負責執行具體的搬運、揀選、分揀等任務。現代AGV已從早期的磁導引、激光導引,發展到基于SLAM(同步定位與建圖)技術的自然導航AGV,具備更高的環境適應性和部署靈活性。
- 調度與控制層: 這是系統的“中樞神經”。智能控制系統(如WCS倉庫控制系統、AGV調度系統)在此層運行,負責接收上層指令,對AGV車隊進行任務分配、路徑規劃、交通管制和實時監控。它需要高效處理多車協同、動態避障、充電調度等復雜問題。
- 管理與決策層: 以WMS(倉庫管理系統)或ERP(企業資源計劃)系統為代表,負責倉儲業務的整體管理,如庫存管理、訂單處理、策略制定。該層向控制層下達作業指令,并接收反饋數據,形成決策閉環。
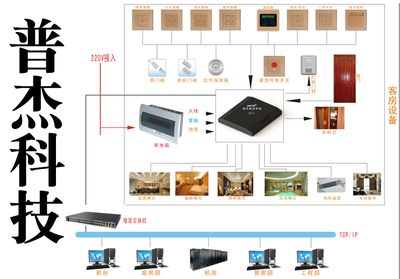
三層架構通過標準化的數據接口(如API、Web Service)和通信協議(如TCP/IP, MQTT)緊密連接,確保信息流從決策到執行的順暢貫通。
二、 AGV方案與智能控制系統集成的技術要點
成功的集成并非簡單的硬件連接,而是軟硬一體的深度融合:
- 統一的任務調度與優化: 智能控制系統需將WMS下發的訂單,動態分解為AGV可執行的任務序列(如取貨、送貨、等待)。高級算法(如啟發式算法、強化學習)被用于優化任務分配與路徑規劃,以最小化任務完成時間、空載里程和總體能耗。
- 實時數據交互與數字孿生: AGV通過車載傳感器(激光雷達、視覺相機、慣性測量單元)持續采集位置、狀態、環境數據,并實時上傳至控制系統。控制系統利用這些數據構建倉儲環境的“數字孿生”,實現物理世界的虛擬映射,從而進行仿真測試、實時監控與預測性維護。
- 柔性導航與動態適應: 集成的SLAM導航AGV能與控制系統共享地圖信息。當倉儲布局變更(如貨架移動、臨時障礙)時,AGV可實時更新地圖并調整路徑,控制系統則同步更新交通管制策略,實現系統級的動態適應能力。
- 安全協同與交通管理: 在多AGV作業場景下,智能控制系統需充當“空中交通管制員”,制定嚴格的通行規則,通過區域控制、路徑預約、優先級調度等方式,防止碰撞和死鎖,確保作業安全與高效。
- 無縫對接倉儲設備: AGV方案需與提升機、輸送線、自動包裝機、機器人揀選站等周邊設備聯動。智能控制系統負責協調各設備的動作時序,實現從入庫、存儲、揀選到出庫的全流程自動化接力。
三、 集成帶來的協同價值
深度集成釋放了“1+1>2”的協同效應:
- 極致效率提升: 實現7x24小時不間斷作業,訂單響應時間大幅縮短,倉儲吞吐量顯著提高。
- 運營成本優化: 減少對固定基礎設施(如傳送帶)的依賴和人工成本,通過優化調度降低能耗。
- 卓越的柔性與可擴展性: 系統可通過增減AGV數量、調整軟件策略快速適應業務波動或布局變化,投資更具彈性。
- 數據驅動決策: 集成系統沉淀的海量運行數據,為分析倉庫瓶頸、優化庫存布局、預測設備故障提供了數據基礎,驅動倉儲管理持續精益化。
- 高可靠性保障: 集中監控與智能診斷能力,使得故障能夠被快速定位和處理,保障系統穩定運行。
四、 實施挑戰與展望
實施集成方案也面臨挑戰,如初期投資較高、對現場網絡與基礎設施要求嚴格、需要跨領域的專業團隊進行部署與維護等。隨著5G、邊緣計算、人工智能技術的進一步融合,AGV與智能控制系統的集成將向更自主、更智能的方向演進。例如,具備群體智能的AGV集群能夠自我組織與協調;AI算法將使預測性調度和異常處理更加精準。
AGV小車方案與智能控制系統的深度集成,是構建下一代智能物流倉儲的基石。它不僅僅是技術的疊加,更是通過系統性的融合,重塑倉儲運營模式,為企業打造敏捷、高效、可靠的物流核心競爭力。企業在規劃實施時,應著眼于整體架構設計,選擇開放、可擴展的解決方案,并注重業務流程與技術的匹配,方能最大化釋放集成系統的巨大潛能。